
1.1. Выбор типа датчика и настройка.
В зависимости от задачи для измерений можно использовать либо датчики вибрации, либо датчики перемещения.
Для выбора типа датчика необходимо на панели “Sensor type” (внизу главного окна) поставить метку в поле “Vibro” или “Linear”.

Рис. 1. Главное рабочее окно программы.
Перед началом измерения необходимо убедиться, что правильно заданы коэффициенты преобразования датчиков. Для этого в главном рабочем окне программы (см. рис.1) нажать кнопку «F4-Settings» и перейти в окно настроек, предназначенное для ввода коэффициентов преобразования (см. рис.2).
В рабочем окне, представленном на рис.2, в соответствующих полях должны быть введены коэффициенты преобразования датчиков линейных перемещений и датчиков вибрации. Эти коэффициенты указаны в паспорте на прибор. Обычно их менять не требуется.
Для используемых в комплекте прибора «Балком1» датчиков линейных перемещений коэффициенты преобразования соответственно равны:
Кпрл1= 0,94 мВ/мкм (коэффициент преобразования датчика 1-го канала);
Кпрл2= 0,94 мВ/мкм (коэффициент преобразования датчика 2-го канала.
Для правильной работы датчик линейного перемещения необходимо установить на определенном расстоянии от поверхности объекта измерения. Номинальный зазор между поверхностью и торцом датчика равен 3,5 мм. При этом на выходе датчика присутствует постоянное напряжение 2.48 вольта. Это напряжение будет показано в полях “Channel1” и “Channel2” для первого и второго канала соответственно.
Для его компенсации необходимо нажать кнопку “Remove DC" («Удалить постоянное смещение»). Небольшое остаточное смещение не будет мешать измерениям.
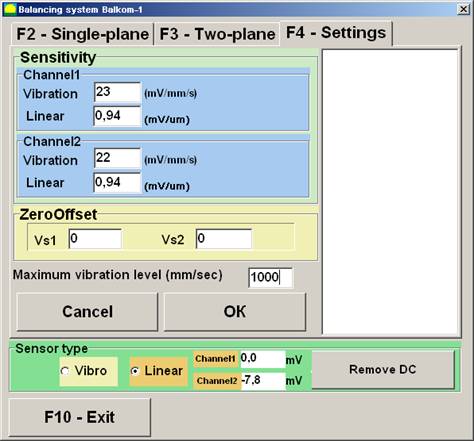
Рис. 2. Рабочее окно для ввода коэффициентов преобразования и выбора типа используемых датчиков
Внимание!
Указанные величины номинального зазора и коэффициенты преобразования датчиков линейных перемещений приведены для роторов из стали.
Для роторов, изготавливаемых из других металлов (меди, бронзы, алюминия) номинальный зазор и коэффициенты преобразования датчиков пользователю необходимо определить экспериментально путем проведения тарировки.
Чтобы сохранить измененные параметры необходимо нажать кнопку “OK”. Новые параметры будут сохранены в файл и использоваться при дальнейших измерениях.
1.2. Измерение радиального биения ротора.
Измерение радиального биения ротора с использованием бесконтактных датчиков может производиться в двух плоскостях по схеме, представленной на рис. 3.
Для проведения измерения и построения при необходимости графиков временной функции и спектра радиального биения ротора необходимо провести ряд подготовительных операций, в том числе:
- выбрать диаметральные сечения ротора, в которых будут проводиться замеры;
- установить бесконтактные датчики линейных перемещений 5 и 6 и датчик фазового угла 7 на станине станка с помощью специальных приспособлений (например, магнитных штативов);
- подключить бесконтактные датчики линейных перемещений к разъёмам Х1 и Х2, а датчик фазового угла к разъёму Х3 измерительного блока;
- выставить номинальный измерительный зазор ∆ между поверхностью ротора и чувствительным элементом для каждого датчика линейных перемещений (для ротора, изготовленного из стали, ∆ =3.5 мм);
- установить на роторе светоотражающую метку, необходимую для срабатывания для датчика фазового угла 7 и проверить срабатывание датчика;
- подключить измерительный блок к компьютеру.
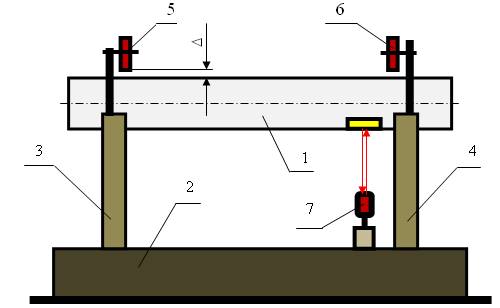
Рис. 4. Рабочее окно режима «Vibration Meter»
Как видно из рис.4 одновременно с таблицей в правой части данного рабочего окна выводятся графики временной функции и спектра радиального биения ротора.
В случае нажатия в главном рабочем окне (см. рис. 1) кнопки «F8 – Charts» дисплей компьютера выводится рабочее окно «Графики» (см. рис.5), предназначенное для построения различных видов графиков радиального биения ротора.

Рис. 5. Рабочее окно режима «Графики»
При нажатии в этом окне кнопки «Broadband vibration» на дисплей выводится график временной функции радиального биения ротора.
При нажатии кнопки «Rotation frequency vibration » на дисплей выводится график временной функции оборотной составляющей радиального биения ротора.
При нажатии кнопки «Harmonics (1/rev)» на дисплей выводится график разложения радиального биения ротора в гармонический ряд. При этом первой гармонике соответствует величина вибрации на оборотной частоте ротора (1х), второй – на удвоенной частоте (2х) и т.д.
При нажатии кнопки «Spectrum (Hz)» на дисплей выводится спектр радиального биения ротора.
При нажатии кнопки «Orbit» на дисплей выводится график орбиты (прецессии) ротора.
1.3. Построение графика орбиты ротора.
Построение графика орбиты ротора может производиться по схеме, представленной на рис. 6.
Рис. 6. Схема измерения орбиты ротора 1а – ротор (вид с торца); 1б – ротор (вид сбоку); 2, 3 – бесконтактные датчики; 4 – отражающая метка датчика фазового угла.
Для проведения измерения и построения соответствующего графика необходимо провести ряд подготовительных операций, в том числе:
- установить бесконтактные датчики линейных перемещений 2 и 3 в одном из диаметральных сечений ротора под углом 90° друг к другу, при условии, что измерительная ось датчика 2 должна совпадать с осью Х, а измерительная ось датчика 3 - с осью У;
- выставить номинальный измерительный зазор ∆х (∆у) между поверхностью ротора и чувствительным элементом каждого датчика линейных перемещений (для стали ∆ =3.5 мм);
- установить датчик фазового угла ( на схеме не показан) в плоскости Х – Z, совпадающей с плоскостью установки бесконтактного датчика 2;
- установить на образующей ротора 1 в плоскости Х – Z отражающую метку 4, необходимую для работы датчика фазового угла;
- подключить бесконтактные датчики линейных перемещений 2 и 3 к разъёмам Х1 и Х2, а датчик фазового угла к разъёму Х3 измерительного блока;
- подключить измерительный блок к компьютеру.
Для начала измерения орбиты ротора в главном рабочем окне (см. рис. 1)
необходимо нажать кнопку «F8 – Charts» и перейти в рабочее окно «Графики» (см. рис.5), которое предназначено для построения различных видов графиков радиального биения ротора.
В этом рабочем окне необходимо нажать кнопку «Orbit», после чего на дисплей компьютера выводится рабочее окно, в котором производится необходимый цикл измерений (см. рис.7) .
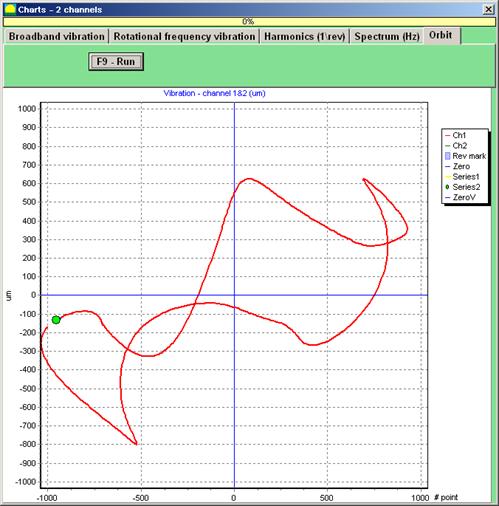
Рис.7. График орбиты ротора
Для продолжения работы в указанном рабочем окне (см. рис.7) следует включить вращение ротора и, нажав кнопку «F9 – RUN», выполнить измерения мгновенных значений радиального биения ротора Sxi и Sуi на периоде равном одному обороту ротора.
Полученный в процессе измерения массив мгновенных значений Sxi и Sуi используется для расчёта координат орбиты контролируемого ротора, который производится по формуле:
S∑i = √ (Sxi² + Syi²) (1)
где S∑i – мгновенное значение координаты орбиты ротора, рассчитанное для i-й точки графика;
Sxi - мгновенное значение радиального биения ротора, измеренное по координате Х с помощью датчика 1 в i-й точке;
Sуi - мгновенное значение радиального биения ротора, измеренное по координате У с помощью датчика 2 в i-й точке.